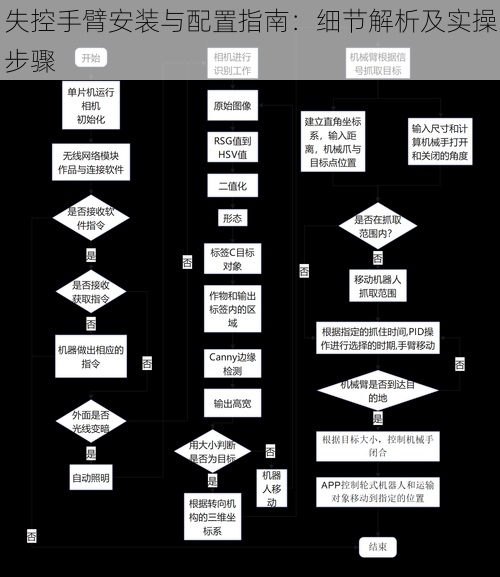
失控手臂安装与配置指南:细节解析及实操步骤
在当今科技迅猛发展的时代,人工智能已经逐渐融入我们生活的方方面面。其中,失控手臂作为一种高级智能机械装置,被广泛应用于工业、医疗、科研等领域。本文将详细介绍失控手臂的安装与配置过程,帮助读者顺利完成这一复杂任务。在开始之前,让我们了解一下失控手臂的及其重要性。失控手臂能够模拟人类手臂的运动,执行各种精确操作,提高工作效率。掌握正确的安装配置方法,对于确保设备正常运行至关重要。
二、设备准备与检查
1. 设备清单整理:在开始安装失控手臂之前,首先要准备好所有必要的设备和工具,如手臂主体、控制器、电源、螺丝刀等。
2. 设备检查:仔细检查每一部分是否完好无损,确保设备在运输过程中没有受到损坏。
3. 控制器配置:按照说明书正确配置控制器,确保其与手臂主体相匹配。
三、安装手臂主体
1. 选择安装位置:选择一个平稳、牢固的台面,确保手臂主体安装后不会晃动。
2. 安装底座:按照说明书将底座固定在台面上。
3. 组装手臂:将手臂各部分按照顺序组装起来,确保每个关节都能灵活运动。
四、连接电源与控制器
1. 电源连接:将电源插头插入手臂主体的电源插口,并确保电源供应稳定。
2. 控制器连接:使用随机提供的线缆,将控制器与手臂主体连接起来。
3. 测试运行:在连接完成后,测试手臂的运行情况,确保其能够正常工作。
五、软件配置与调试
1. 软件安装:根据说明书,在电脑上安装相应的控制软件。
2. 参数设置:在软件中设置手臂的各项参数,如运动速度、工作范围等。
3. 调试与校准:对失控手臂进行调试与校准,确保其运动精确、稳定。
六、操作注意事项
1. 操作前准备:在操作失控手臂之前,要确保周围环境安全,避免发生意外。
2. 遵循说明书:在操作时要严格按照说明书进行操作,避免误操作导致设备损坏或人身伤害。
3. 维护保养:定期对失控手臂进行维护保养,延长其使用寿命。
七、实操步骤总结
完成以上步骤后,失控手臂的安装与配置工作就基本完成了。为了验证安装效果,可以进行一些测试操作,确保失控手臂能够正常工作。为了更好地使用失控手臂,还需要了解其操作技巧和维护方法。在使用过程中,如果遇到,可以参考说明书或联系厂家寻求帮助。
本文详细介绍了失控手臂的安装与配置过程,包括设备准备、安装手臂主体、连接电源与控制器、软件配置与调试等方面。通过本文的指导,读者可以顺利完成失控手臂的安装与配置工作。在使用失控手臂时,要遵循操作注意事项,确保设备正常运行。希望本文能对读者有所帮助,为未来的科研工作提供便利。